- 1970 年的 WABOT 项目凸显了早稻田大学在人形机器人开发中的先驱角色,从多功能 WABOT-1 开始,发展到擅长音乐的 WABOT-2,标志着机器人工程和人工智能领域的重大进步。
- Asimo,是本田自 1986 年以来开发的人形机器人,作为机器人的先驱大使,能够像人类一样行动,如跑步、跳舞和踢足球。
- ChatGPT Atlas,由波士顿动力公司在 DARPA 资助下开发的双足人形机器人,旨在协助搜救行动,配备了先进的移动性和精细运动技能,汲取了早期型号如 PETMAN 的技术。
人形机器人的发展是科技发展中一个跨学科、跨世代的历史,涉及众多创新者,每位科学家或工程师在不同阶段都做出了贡献。
另请阅读: Tesla 的人形机器人 Optimus 或于 2025 年首次亮相
早稻田大学启动 WABOT 项目
早稻田大学理工学院的四个实验室联合成立了“生物工程小组”,于 1970 年启动了 WABOT 项目。
WABOT-1 是世界上第一个有趣的人形机器人。它由肢体控制系统、视觉系统和对话系统组成。WABOT-1 能够用日语与人交流,并利用外部接收器、人工耳朵和眼睛以及人工嘴巴来测量物体的距离和方向。WABOT-1 用下肢行走,并能用带有触觉传感器的手抓取和搬运物体。据估计,WABOT-1 的智力相当于一岁半的儿童。WABOT-1 由 WAM-4(作为其人工手)和 WL-5(作为其人工腿)组成。
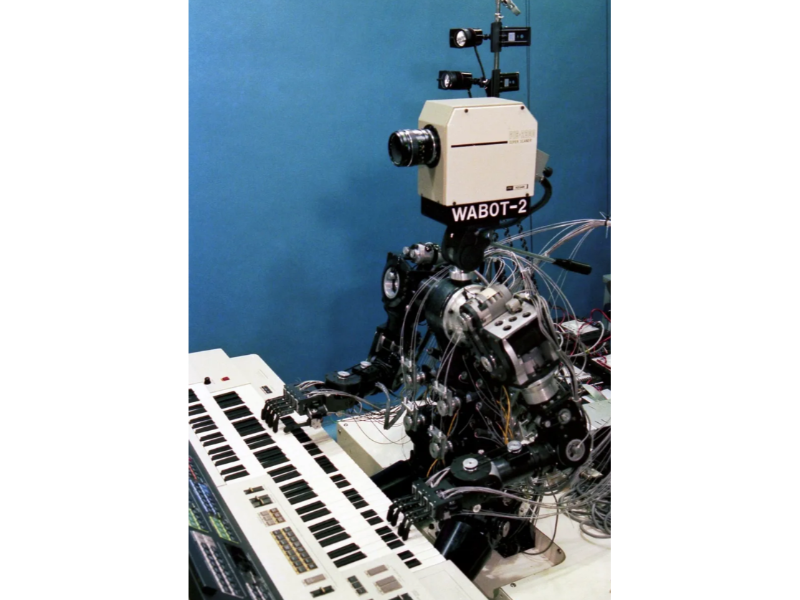
1980 年,各实验室再次联合,启动了 WABOT-2 项目。演奏键盘乐器被设定为 WABOT-2 要完成的智能任务,因为演奏键盘乐器这样的艺术活动需要类似人类的智能和灵巧性。因此,WABOT-2 被定义为“专家机器人”,而非像 WABOT-1 那样的通用机器人。
音乐机器人 WABOT-2 能与人对话,用眼睛识读普通乐谱,并在电子琴上演奏中等难度的曲目。WABOT-2 还能在聆听人唱歌时为其伴奏。WABOT-2 是开发“个人机器人”的首个里程碑。
另请阅读:汽车制造商 Magna 将试用 Sanctuary AI 的人形机器人
本田推出 Asimo
Asimo是一款旨在帮助人类的人形机器人。它能跑、能跳舞、能跳、能踢足球。它作为机器人使者周游世界,让人类对机器人技术感到兴奋。
本田于 1986 年开始开发人形机器人。在接下来的 15 年里,该公司制造了大约十几个原型。早期的机器人(型号 E1 至 E6)专注于腿部运动。随后,本田工程师为机器人增加了头部、躯干和手臂,以改善平衡并增加功能。
1993 年,本田推出了其第一个人形机器人 P1,这是一个相当庞大的机器,高 1.9 米,重 175 公斤。随后在 1996 年推出了 P2,1997 年推出了 P3。2000 年 10 月 31 日,本田推出了如今著名的 Asimo。2004 年,Asimo 入选卡内基梅隆大学的机器人名人堂,成为首个展示真正类人移动能力的机器人。第二代 Asimo 于 2005 年首次亮相。
2011 年 11 月,本田推出了改进设计,称为“全新 Asimo”。凭借增强的身体能力,新款 Asimo 可以向后跑、连续上下跳跃,甚至单脚跳。然而,2018 年本田表示将暂停 Asimo 的开发,转而致力于开发更实用的机器人,如老年护理和灾难救援机器人。2022 年初,本田宣布 Asimo 退役,结束了四十年来令人印象深刻的机器人技术进步,这些进步激励了其他工程师并抓住了公众的想象力。
波士顿动力公司开发 Atlas
Atlas 是一款双足人形机器人,主要由美国机器人公司波士顿动力开发,资金和监督来自美国国防高级研究计划局(DARPA)。
Atlas 的设计和生产由美国国防部机构 DARPA 与波士顿动力公司合作监督。该机器人的一只手由桑迪亚国家实验室开发,另一只手由 iRobot 开发。
2013 年,DARPA 项目经理吉尔·普拉特将 Atlas 的原型版本比作小孩,说“一个 1 岁的孩子几乎不能走路,一个 1 岁的孩子经常摔倒……这就是我们目前所处的阶段”。
Atlas 基于波士顿动力早期的 PETMAN 人形机器人,并配备了蓝色 LED 灯。Atlas 装有两个视觉系统——激光测距仪和立体相机,均由外部计算机控制——并拥有具备精细运动技能的手。其四肢共有 28 个自由度。
Atlas 能够使用手臂和腿部在崎岖地形中导航并独立攀爬,尽管 2013 年的原型版本需要连接外部电源。
Atlas 旨在协助紧急服务部门进行搜索和救援行动,执行诸如关闭阀门、开门以及在人类无法生存的环境中操作动力设备等任务。美国国防部在 2013 年表示,无意将该机器人用于进攻或防御性战争。