
- El proyecto WABOT de 1970 destacó el papel pionero de la Universidad de Waseda en el desarrollo de robots humanoides, comenzando con el multifuncional WABOT-1 y evolucionando hasta el hábil musical WABOT-2, marcando avances significativos en el campo de la ingeniería robótica y la inteligencia artificial.
- Asimo, un robot humanoide desarrollado por Honda desde 1986, sirvió como embajador pionero de la robótica, capaz de movimientos similares a los humanos como correr, bailar y jugar al fútbol.
- Atlas, un robot humanoide bípedo desarrollado por Boston Dynamics con financiación de DARPA, está diseñado para ayudar en operaciones de búsqueda y rescate, equipado con movilidad avanzada y habilidades motoras finas, basándose en tecnologías desarrolladas en modelos anteriores como PETMAN.
El desarrollo de robots humanoides es una historia interdisciplinaria e intergeneracional en el desarrollo de la ciencia y la tecnología, que ha involucrado a muchos innovadores, con cada científico o ingeniero contribuyendo en diferentes etapas.
Lea también: El robot humanoide de Tesla, Optimus, podría debutar en 2025
La Universidad de Waseda inicia el proyecto WABOT
Cuatro laboratorios de la Facultad de Ciencia e Ingeniería de la Universidad de Waseda se unieron para crear el “Grupo de Bioingeniería”, que inició el proyecto WABOT en 1970.
El WABOT-1 fue el primer robot antropomórfico a escala real desarrollado en el mundo. Consistía en un sistema de control de extremidades, un sistema de visión y un sistema de conversación. El WABOT-1 podía comunicarse con una persona en japonés y medir distancias y direcciones a los objetos utilizando receptores externos, oídos y ojos artificiales, y una boca artificial. El WABOT-1 caminaba con sus extremidades inferiores y podía agarrar y transportar objetos con manos que utilizaban sensores táctiles. Se estimó que el WABOT-1 tenía la capacidad mental de un niño de un año y medio.
El WABOT-1 consistía en el WAM-4 (como sus manos artificiales) y el WL-5 (sus piernas artificiales).
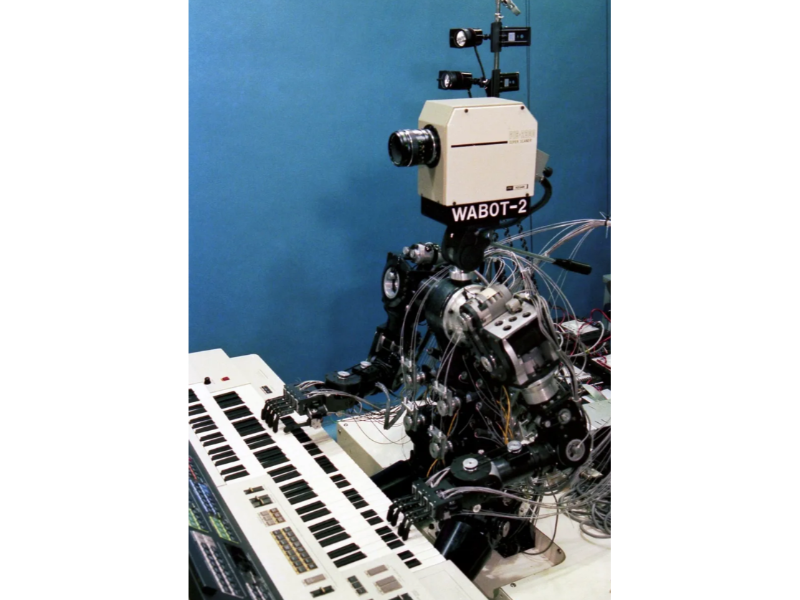
En 1980, los laboratorios se unieron nuevamente en un proyecto conjunto y comenzaron el proyecto WABOT-2. Tocar un instrumento de teclado se estableció como una tarea inteligente que el WABOT-2 pretendía lograr, ya que una actividad artística como tocar un instrumento de teclado requeriría inteligencia y destreza similares a las humanas. Por lo tanto, el WABOT-2 se definió como un “robot especialista” en lugar de un robot versátil como el WABOT-1.
El robot músico WABOT-2 puede conversar con una persona, leer una partitura musical normal con su ojo y tocar melodías de dificultad media en un órgano electrónico. El WABOT-2 también es capaz de acompañar a una persona mientras escucha a la persona cantar. El WABOT-2 fue el primer hito en el desarrollo de un “robot personal”.
Lea también: Los fabricantes de automóviles Magna probarán los robots humanoides de Sanctuary AI
Honda crea a Asimo
Asimo es un robot humanoide diseñado para ser un ayudante para las personas. Puede correr, bailar, saltar y patear un balón de fútbol. Viaja por el mundo como embajador de la robótica, entusiasmando a los humanos con la robótica.
Honda comenzó a desarrollar robots humanoides en 1986. Durante los siguientes 15 años, la empresa construiría alrededor de una docena de prototipos. Los primeros robots (modelos E1 a E6) se centraron en la locomoción con piernas. Luego, los ingenieros de Honda agregaron una cabeza, torso y brazos al robot para mejorar el equilibrio y agregar funcionalidad.
En 1993, Honda presentó su primer humanoide, el P1, una máquina bastante grande de 1,9 metros y 175 kg. Al P1 le siguieron el P2 en 1996 y el P3 en 1997. El 31 de octubre de 2000, Honda presentó su ahora famoso humanoide, Asimo. En 2004, Asimo fue incluido en el Salón de la Fama de los Robots de Carnegie Mellon como el primer robot en demostrar una verdadera movilidad similar a la humana. Un Asimo de segunda generación debutó en 2005.
En noviembre de 2011, Honda presentó un diseño mejorado, al que llamó “Asimo completamente nuevo”. Con capacidades físicas mejoradas, el nuevo Asimo era capaz de correr hacia atrás, saltar continuamente arriba y abajo, e incluso saltar sobre un pie. Sin embargo, en 2018, Honda dijo que estaba deteniendo el desarrollo de Asimo para trabajar en robots con aplicaciones más prácticas, como robots para el cuidado de ancianos y ayuda en desastres. A principios de 2022, Honda anunció que retiraba a Asimo, poniendo fin a cuatro décadas de impresionantes avances en robótica que inspiraron a otros ingenieros y capturaron la imaginación del público.
Boston Dynamics desarrolla a Atlas
Atlas es un robot humanoide bípedo desarrollado principalmente por la empresa estadounidense de robótica Boston Dynamics con financiación y supervisión de la Agencia de Proyectos de Investigación Avanzada de Defensa de EE. UU. (DARPA).
El diseño y la producción de Atlas fueron supervisados por DARPA, una agencia del Departamento de Defensa de los Estados Unidos, en cooperación con Boston Dynamics. Una de las manos del robot fue desarrollada por los Laboratorios Nacionales Sandia, mientras que la otra fue desarrollada por iRobot.
En 2013, el gerente del programa DARPA, Gill Pratt, comparó la versión prototipo de Atlas con un niño pequeño, diciendo que “un niño de 1 año apenas puede caminar, un niño de 1 año se cae mucho... aquí es donde estamos ahora”.
Atlas se basa en el anterior robot humanoide PETMAN de Boston Dynamics y está iluminado con LED azules. Atlas está equipado con dos sistemas de visión: un telémetro láser y cámaras estéreo, ambos controlados por una computadora externa, y tiene manos con capacidades de habilidades motoras finas. Sus extremidades poseen un total de 28 grados de libertad.
Atlas puede navegar por terrenos difíciles y trepar de forma independiente usando sus brazos y piernas, aunque la versión prototipo de 2013 estaba atada a una fuente de alimentación externa.
Atlas está destinado a ayudar a los servicios de emergencia en operaciones de búsqueda y rescate, realizando tareas como cerrar válvulas, abrir puertas y operar equipos motorizados en entornos donde los humanos no podrían sobrevivir. El Departamento de Defensa declaró en 2013 que no tenía interés en usar el robot para guerra ofensiva o defensiva.